Инженеры из Гонконгского университета науки и технологий разработали летающего робота AET (Aerial Elephant Trunk, «Воздушный хобот слона») — квадрокоптер, к которому подключен гибкий трехсекционный манипулятор. Захват может изгибаться, охватывать объекты и маневрировать в ограниченном пространстве.
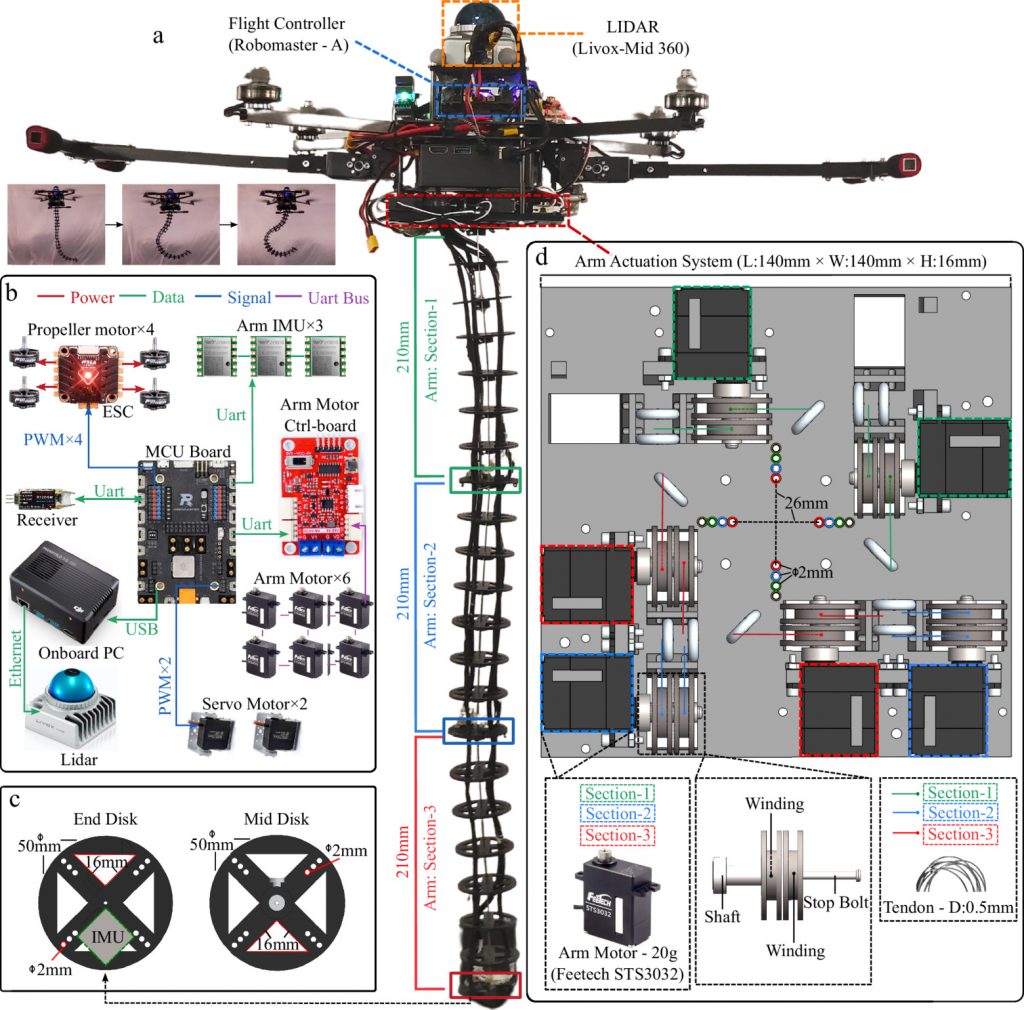
Манипулятор построен по принципу хобота слона: он представляет собой гибкую конструкцию с тросовым приводом. Внутри каждой секции натягиваются и ослабляются тросы, позволяя «хоботу» изгибаться в разных направлениях. Такой подход отличается от жестких роботизированных захватов, которые обычно ограничены по подвижности и весу.

Гибкость конструкции позволяет дрону обхватывать предметы различных форм: от узких цилиндров до объектов с нестандартными контурами. Система может проникать в узкие проходы, огибать препятствия и работать в тесных и захламленных пространствах, где классические дроны с жесткими манипуляторами не справляются.
Разработчики предлагают применять AET в аварийных ситуациях: для осмотра труднодоступных объектов, уборки завалов после стихийных бедствий и работы с повреждённой инфраструктурой — например, линиями электропередач.
Читать далее:
На обложке: робот AET. : The University of Hong Kong
The post appeared first on .